
Line Following Robot
This is a first year group project. The goal was to build a robot that follows a line marked on the ground and avoid other obsticles.
Here is the build robot, taken in Week 2 of the project.

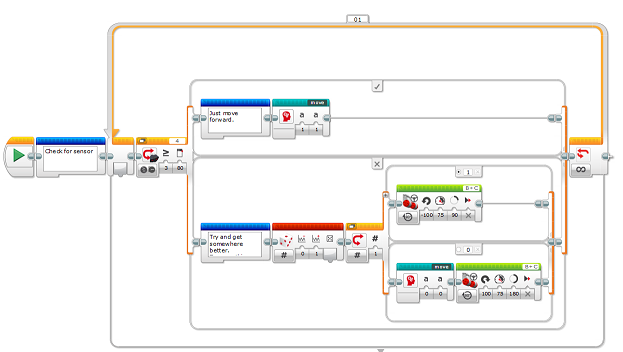
An early test version of the code that I wrote. This version uses the infrared sensor
to avoid objects that are in the way.